Event-Driven Agent Systems: Scaling Beyond A2A and ACP


Event-Driven Agent Systems: Scaling Beyond A2A and ACP
🧠 TL;DR
Most autonomous agents today communicate like humans on the phone — direct, interruptive, and hard to trace. But in scalable AI systems, agents need walkie-talkies, not phones.
Enter EVA: Event-driven Agentic Architecture — a design that replaces direct calls with asynchronous, observable event streams.
But there's more. To ensure these agents can agree on facts or actions in this indirect, decoupled world, we need distributed consensus protocols — applied intelligently.
🚫 The Problem With Direct Agent Communication
Many modern agent protocols are built around the assumption that agents should message each other directly — like services calling each other’s APIs, or humans texting back and forth.
Protocols like A2A (Agent-to-Agent) and ACP (Agent Communication Protocol) provide structured ways for agents to say:
"Hey, you — here’s a goal, go do it."
While structured, these patterns fall short for scalable, autonomous systems.
❌ 1. Tight Coupling (A2A & ACP)
Direct messaging protocols require agents to know about each other — their endpoints, their capabilities, their existence. This kills modularity:
- Every new agent means updating old ones.
- You get a spaghetti graph of inter-agent calls.
- Everything breaks if a single peer goes missing.
In contrast, EVA’s event model lets agents broadcast events.
Whoever's listening takes care of it. No hard dependencies.
❌ 2. Brittle Orchestration (ACP, CNP)
ACP and CNP enable agents to negotiate tasks or initiate request-response chains. But:
- They assume agents are online, cooperative, and in sync.
- Implicit dependencies creep in.
- They crumble in volatile, asynchronous environments.
EVA says: “Just emit an event. Whoever’s available will pick it up.”
You don’t need to ask who’s free. You don’t even need to know who.
❌ 3. Invisibility and Debugging Hell
When agents communicate directly, you lose traceability:
- What caused agent X to act?
- Why did Y trigger a cascade?
- Who broke everything?
EVA provides a built-in event log.
You can trace system behavior like a timeline:
task.created → plan.generated → plan.executed
❌ 4. No System Memory
In A2A/ACP, once a message is sent, it’s gone.
No history. No replay. No simulations.
Event buses (like NATS, Kafka) are memory.
Want to test a new agent on last week’s data? Just replay the stream.
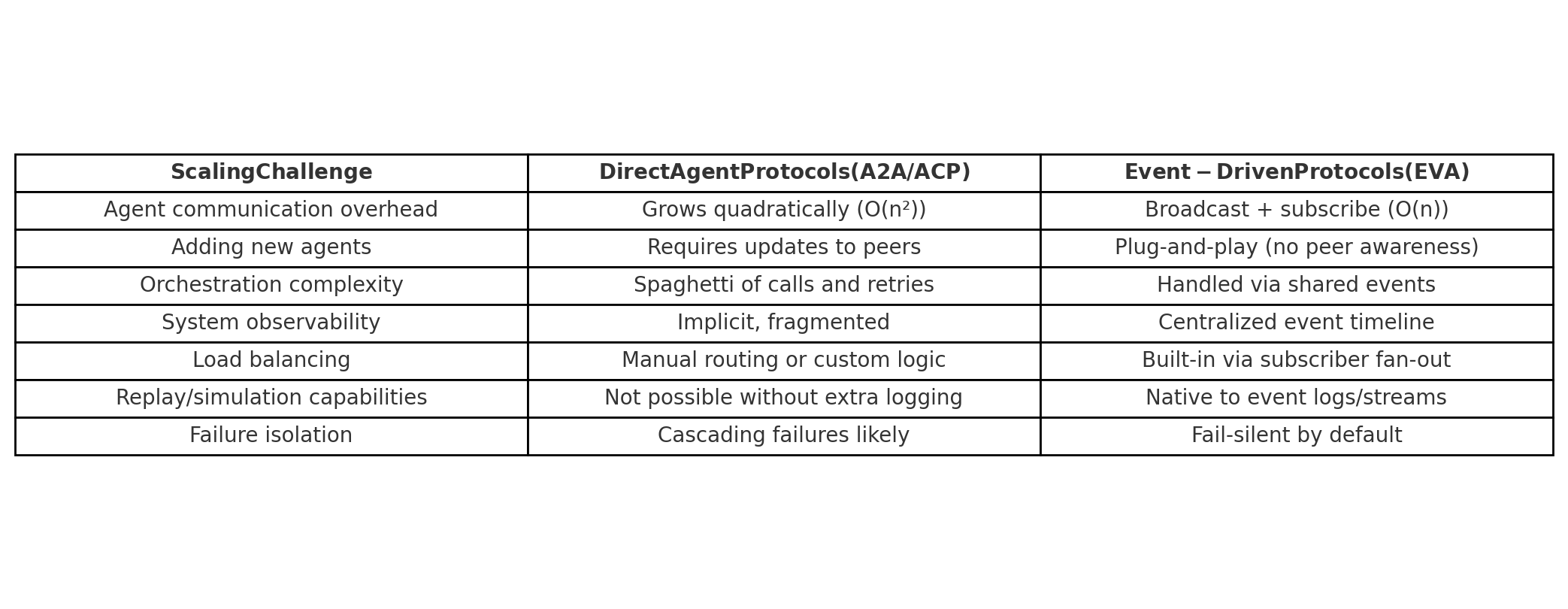
❌ 5. Scaling Issues
As agents grow:
- Direct messaging scales as
O(n²) - Who coordinates? Who retries? Who owns what?
Event-driven systems scale as O(n).
Agents subscribe to what they care about. That’s it.
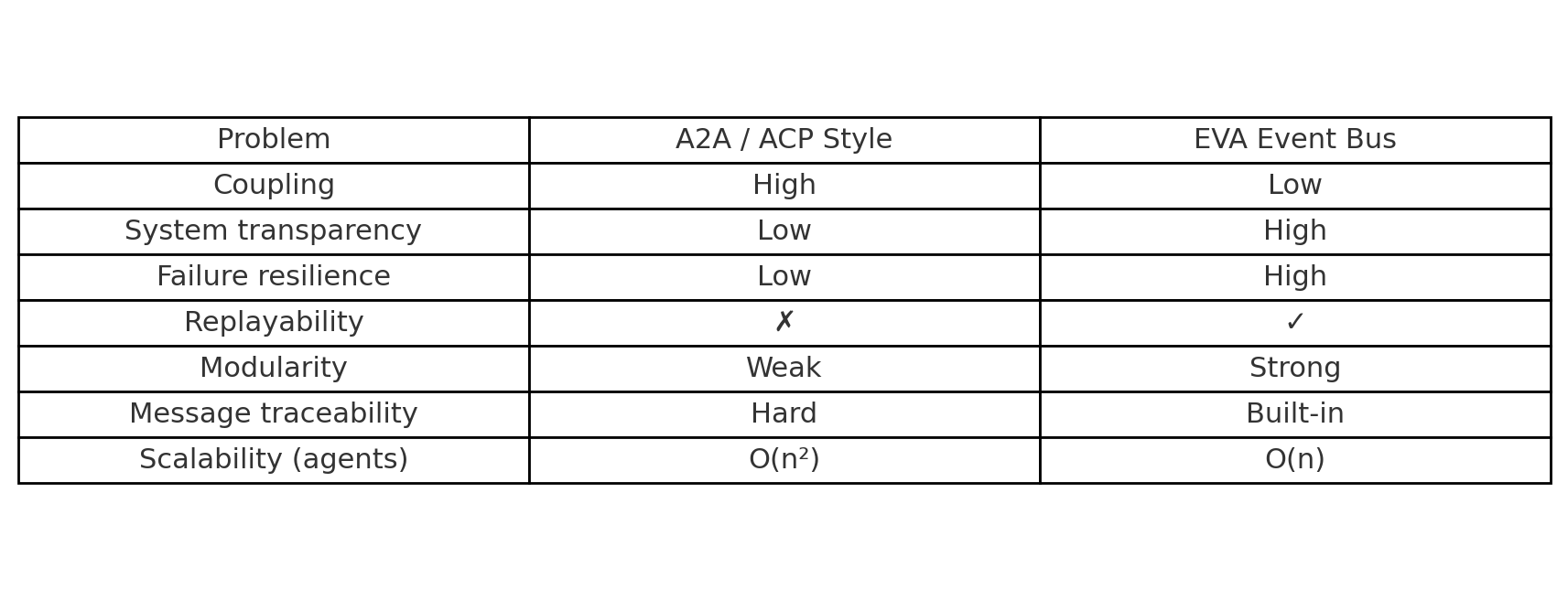
🔄 Recap: Why Direct Agent Protocols Break at Scale
✅ EVA: Talk in Events, Not Calls
EVA proposes a different paradigm:
🧠 “Agents don’t talk to each other. They talk to the system. The system is an event bus.”
Each agent:
- Listens to topics it cares about.
- Emits structured events after acting.
- Stays independent from other agents’ logic.
This improves resilience, observability, and plugability.
It turns your agent system into a living, breathing mesh — not a pile of brittle wires.
🧩 But What About Agreement? Enter Consensus.
Sometimes agents do need to agree:
- Was the anomaly real?
- Did enough classifiers see the same object?
- Is the shared memory in sync?
Instead of direct voting or RPCs, EVA leverages consensus protocols.
🧠 Consensus Protocols That Work With EVA
1. Event-Triggered Consensus
Only send updates when things change.
No chatter. Just signal on state change.
✅ Lightweight
✅ Reactive
✅ Great for swarm behavior and sensor fusion
2. PBFT (Practical Byzantine Fault Tolerance)
When agreement matters — and some agents might misbehave — use PBFT.
✅ Fault-tolerant
✅ Proven in distributed systems
✅ Useful for LLM ensemble voting, system safety checks
3. Raft (Leader Election)
Sometimes, you need a planner or conductor. Raft lets you elect one safely.
✅ Great for coordinating workflows
✅ Leader can emittask.assignedevents to the swarm
❌ What Not to Use
✋ PoW/PoS
You’re not mining blocks. Your agents are not crypto bros. Avoid.
✋ Contract Net Protocol
Structured, yes. But relies on direct negotiation. Which, as we've covered, is bad.
🛠 Building EVA + Consensus
📣 Final Pitch
💬 Stop wiring agents like neurons.
🎛 Start treating them like signals in a cybernetic mesh.
📡 Give them a protocol that respects autonomy, observability, and trust.
That’s EVA — event-driven, consensus-aware, and built for real multi-agent scale.
🪄 Want to See It in Action?
- 🔗 GitHub (Coming soon): github.com/hwclass/eva-protocol
- 🌐 Live demo: agents summarizing real-time news via NATS + SQLite + Astro/Solid
- 📜 Coming soon:
eventagents.dev– the open protocol spec
📚 References
- A2A: Agent-to-Agent Communication Protocol
- ACP: Agent Communication Protocol
- MCP: Model Context Protocol
- Event-triggered consensus in multi-agent systems
- Meng, X., Li, T., & Ren, W. (2018)
- arXiv
- Practical Byzantine Fault Tolerance (PBFT)
- Castro, M., & Liskov, B. (1999)
- OSDI Paper
- In Search of an Understandable Consensus Algorithm (Raft)
- Ongaro, D., & Ousterhout, J. (2014)
- Raft Paper
- The Contract Net Protocol
- Smith, R. G. (1980)
- DTIC Citation
- NATS: A high-performance messaging system
- Kafka vs NATS: Choosing an Event Bus
- awesome-consensus (Hellas AI)
Thanks for reading. May your agents signal, not shout.